Our Work
Platforms Built and Proven on Earth
A family of autonomous platforms on a shared, space-adaptable architecture — from a modular testbed to fielded rovers, and now an autonomous drill.
In Development
Autonomous Drill
Electric-pneumatic drilling — teleoperated, with autonomous routines
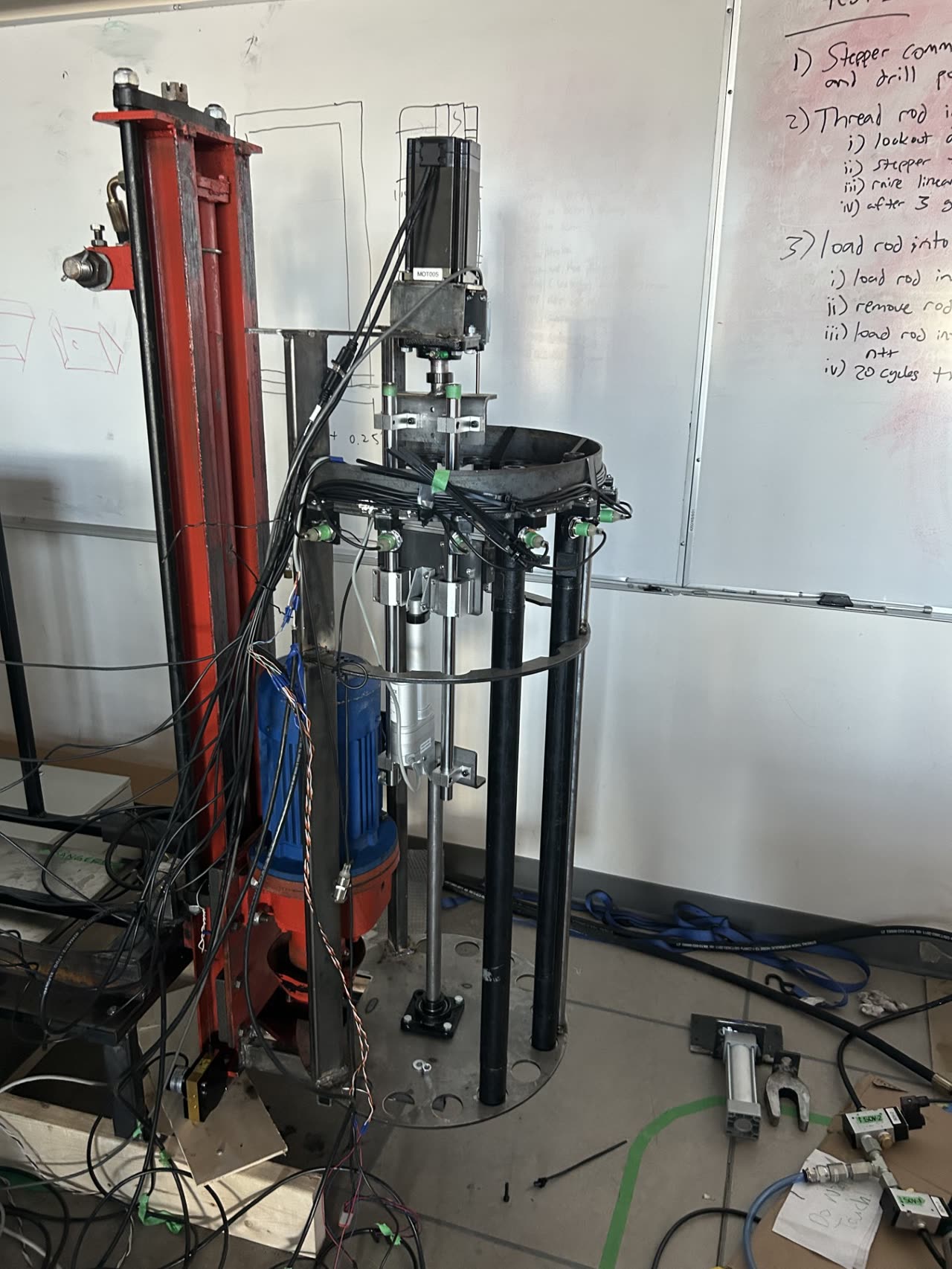
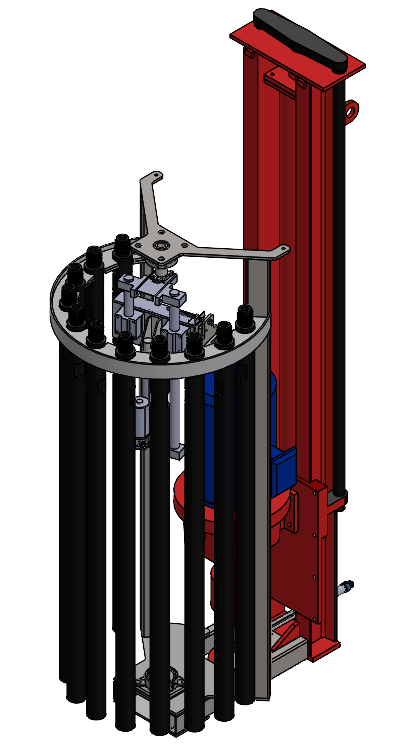
In development. The core specifications below are confirmed; figures may be refined as the system is built and tested.
Drilling is the hard part of resource development — and the part that most needs to become autonomous. Our drill program extends the same architecture as our rovers to the act of boring itself: an operator defines where work should happen — a bore grid over an area, or a line along a path — sets spacing and depth, and the rig plans and executes the program, hole by hole, reporting progress as it goes.
The rig is a 3 kW electric-pneumatic drill with pneumatic feed and an automatic rod handler, so it can add and break rods to reach depth without hands on the rig. It is teleoperated through a web interface and runs basic autonomous routines for repetitive sequences, carries 13 kWh of onboard energy, and bores to 10 m (30 ft).
The goal is to move production volumes of material economically and reliably, with people supervising rather than operating.


Fielded
SLED-75
Four-wheeled companion for trails and remote monitoring
A compact four-wheeled platform with an automotive driveline and battery modules, sized for trails, inspection routes, and remote monitoring.
- 1.0 × 1.2 m
- Footprint
- 4 driven
- Wheels
- Automotive
- Driveline
- 250 kg
- Payload

Fielded
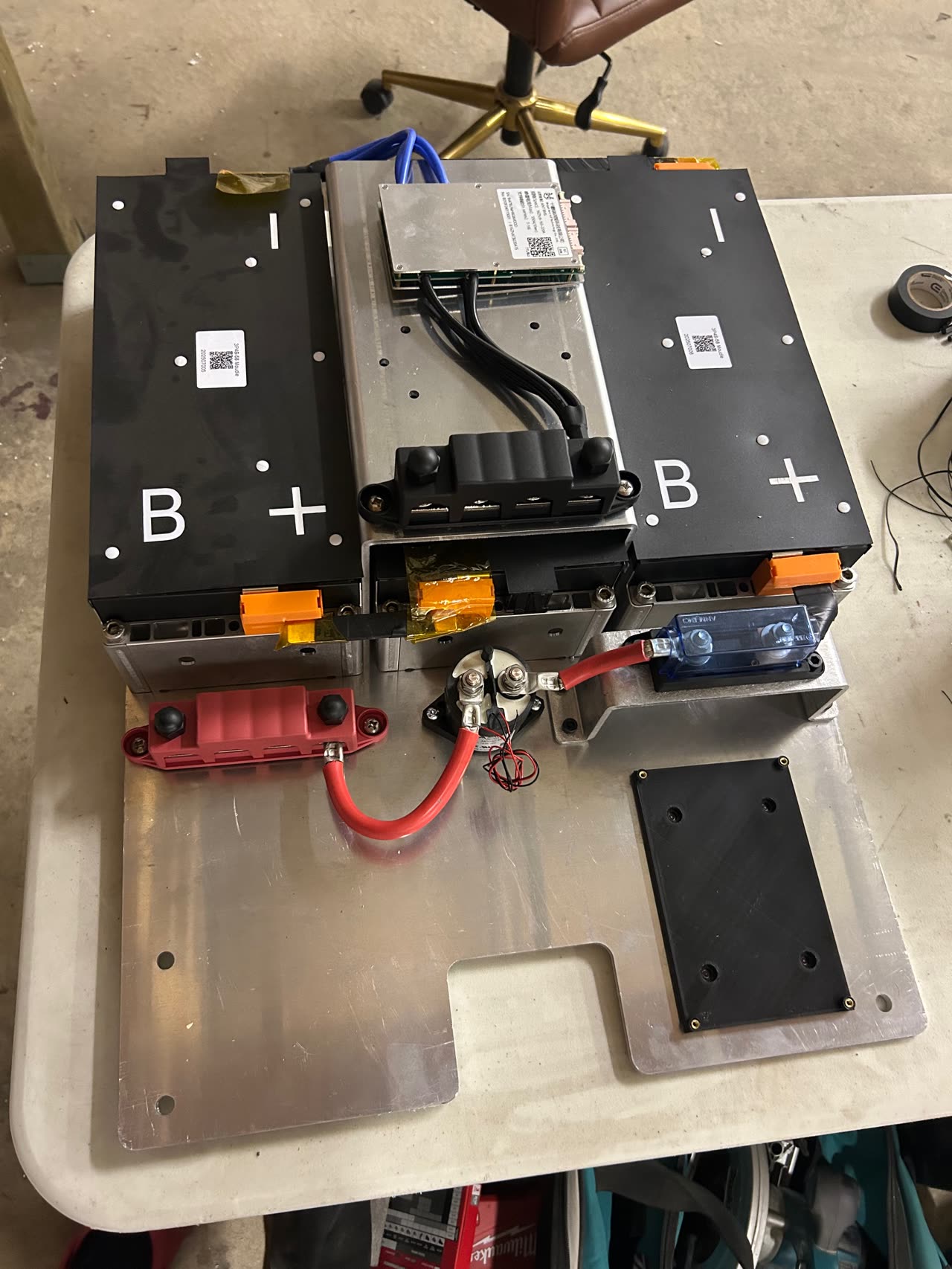
Test Platform
A modular development vehicle with an automotive-grade battery, motor-control cabinet, and main control unit — the testbed our autonomy is built and proven on. (It originally had 16 wheels!)
- Class
- Modular testbed
- Battery
- Automotive-grade
- Electronics
- Motor-control cabinet + main control unit
- Heritage
- Originally 16 wheels